Free-Floating Rigid Body Dynamics
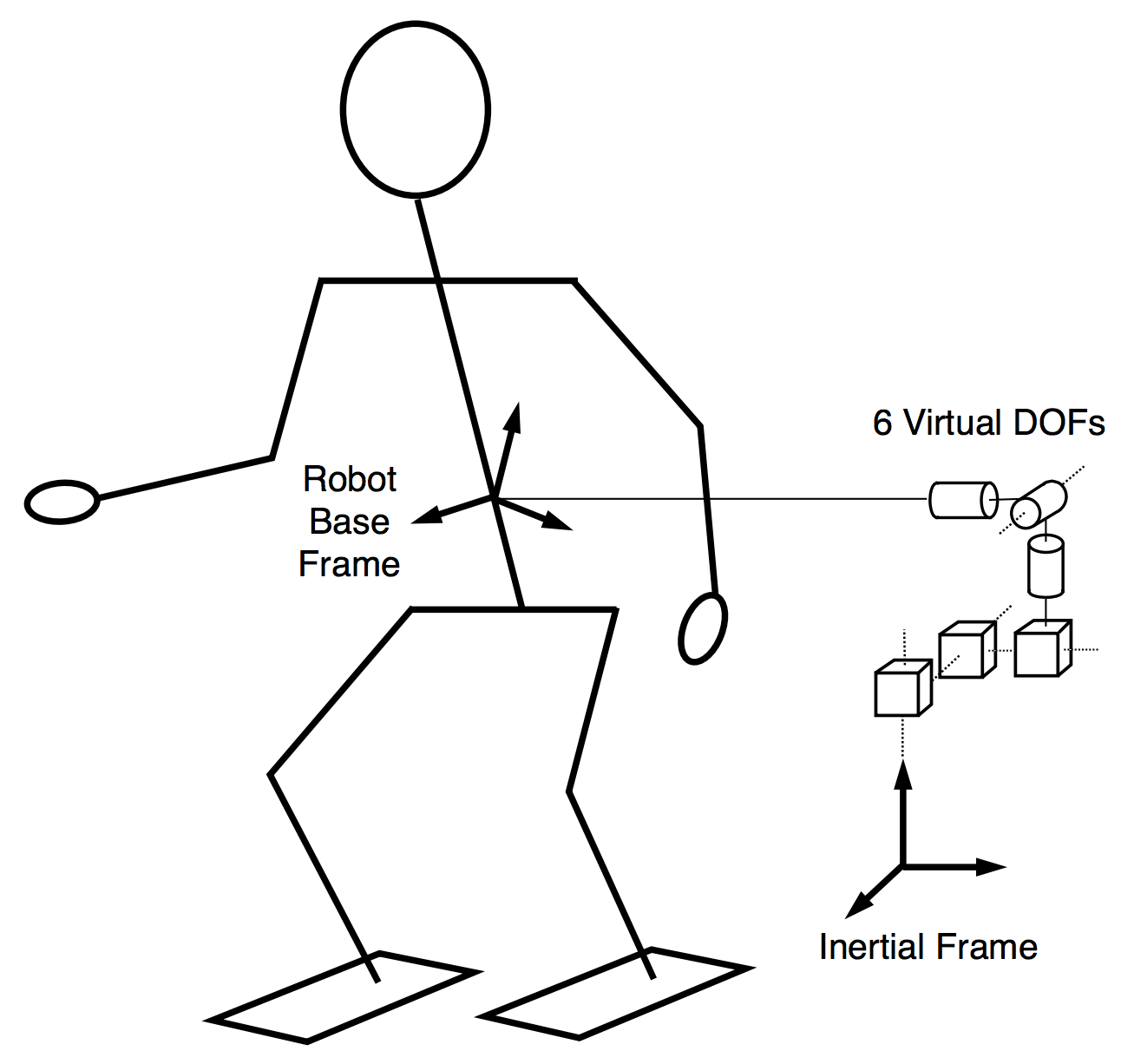
For robots whose root link can float freely in Cartesian space, e.g. humanoids, it is necessary to consider the pose of the root link with respect to (wrt) the inertial reference frame. The primary method for doing so is to account for the root link pose directly in the generalized coordinates,  , of the robot as shown by:
, of the robot as shown by:
Todo
add citations
The generalized configuration parameterization for floating base robots,
(1)
therefore contains the pose of the base link wrtthe inertial reference frame,  , and the joint space coordinates,
, and the joint space coordinates,  . Set brackets are used in (1) because is a homogeneous transformation matrix in
. Set brackets are used in (1) because is a homogeneous transformation matrix in  and is a vector in
and is a vector in  , with
, with  the number of dofof the robot, thus and
the number of dofof the robot, thus and  cannot be concatenated into a vector.
However, the twist of the base,
cannot be concatenated into a vector.
However, the twist of the base,  , with the joint velocities,
, with the joint velocities,  , can be concatenated in vector notation, along with the base and joint accelerations to obtain,
, can be concatenated in vector notation, along with the base and joint accelerations to obtain,
(2)
These representations provide a complete description of the robot’s state and its rate of change, and allow the equations of motion to be written as,
(3)
In (3),  is the generalized mass matrix,
is the generalized mass matrix,  and
and  are the Coriolis-centrifugal and gravitational terms,
are the Coriolis-centrifugal and gravitational terms,  is a selection matrix indicating the actuated degrees of freedom,
is a selection matrix indicating the actuated degrees of freedom,  is the concatenation of the external contact wrenches, and
is the concatenation of the external contact wrenches, and  their concatenated Jacobians.
their concatenated Jacobians.
Grouping and together into  , the equations can by simplified to
, the equations can by simplified to
(4)
The joint torques induced by friction force could also be included in (4), but are left out for the sake of simplicity.
Additionally, the variables  ,
,  , and , can be grouped into the same vector,
, and , can be grouped into the same vector,
(5)
forming the optimization variable from (1), and allowing (4) to be rewritten as,
(6)
Equation (6) provides an equality constraint which can be used to ensure that the minimization of the control objectives respects the system dynamics.