|
ORCA: Optimization-based framework for Robotic Control Applications
|
|
ORCA: Optimization-based framework for Robotic Control Applications
|
#include <Eigen/Dense>#include <limits> Include dependency graph for Utils.h: This graph shows which files directly or indirectly include this file:
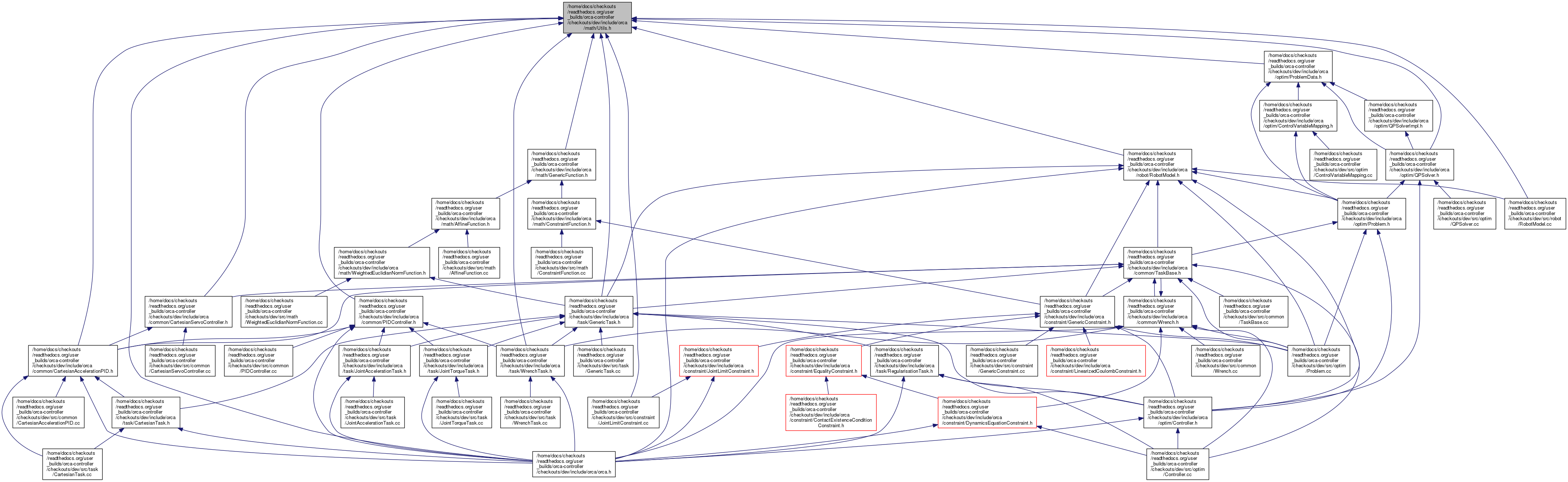
Include dependency graph for Utils.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Classes | |
| struct | orca::math::Size |
Namespaces | |
| orca | |
| orca::math | |
Typedefs | |
| typedef Eigen::Matrix< double, 6, 1 > | orca::math::Vector6d |
Functions | |
| void | orca::math::setToHighest (Eigen::VectorXd &v) |
| template<typename T > | |
| bool | orca::math::equal (const T &a, const T &b) |
| void | orca::math::setToLowest (Eigen::VectorXd &v) |
| Eigen::Vector3d | orca::math::diffRot (const Eigen::Matrix3d &R_a_b1, const Eigen::Matrix3d &R_a_b2) |
| Eigen::Matrix< double, 6, 1 > | orca::math::diffTransform (const Eigen::Matrix4d &t_a_b1, const Eigen::Matrix4d &t_a_b2) |
| Eigen::Quaterniond | orca::math::quatFromRPY (double roll, double pitch, double yaw) |
| Eigen::Quaterniond | orca::math::quatFromKukaConvention (double A, double B, double C) |
Variables | |
| static const double | orca::math::Infinity = std::numeric_limits<double>::infinity() |
 1.8.11
1.8.11