|
ORCA: Optimization-based framework for Robotic Control Applications
|
|
ORCA: Optimization-based framework for Robotic Control Applications
|
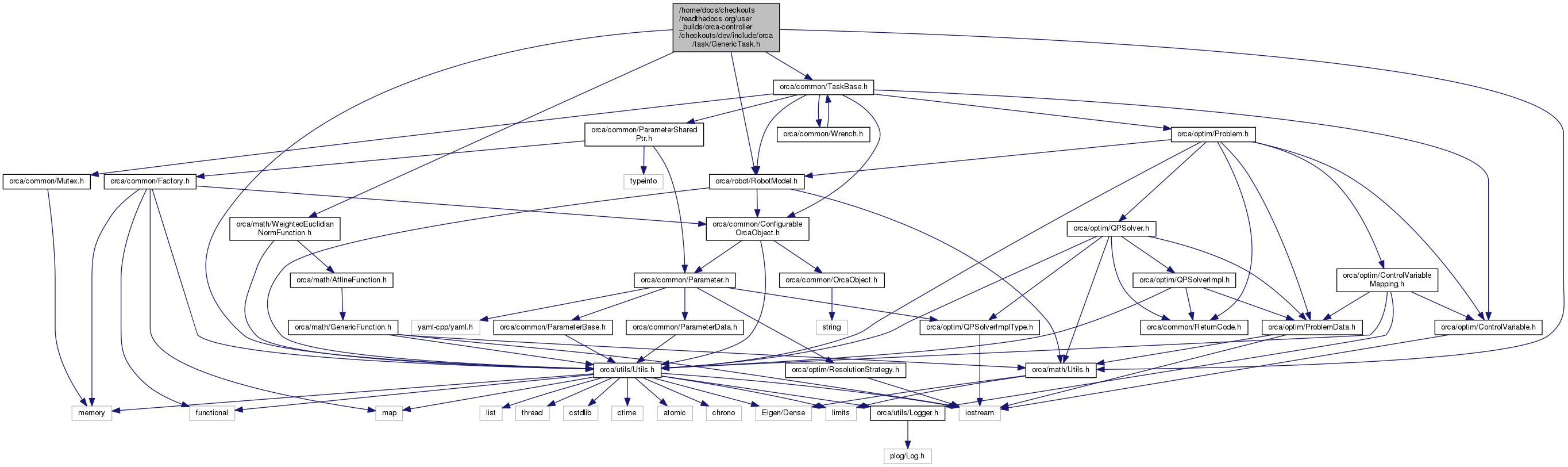
#include "orca/math/Utils.h"#include "orca/utils/Utils.h"#include "orca/math/WeightedEuclidianNormFunction.h"#include "orca/robot/RobotModel.h"#include "orca/common/TaskBase.h" Include dependency graph for GenericTask.h: This graph shows which files directly or indirectly include this file:
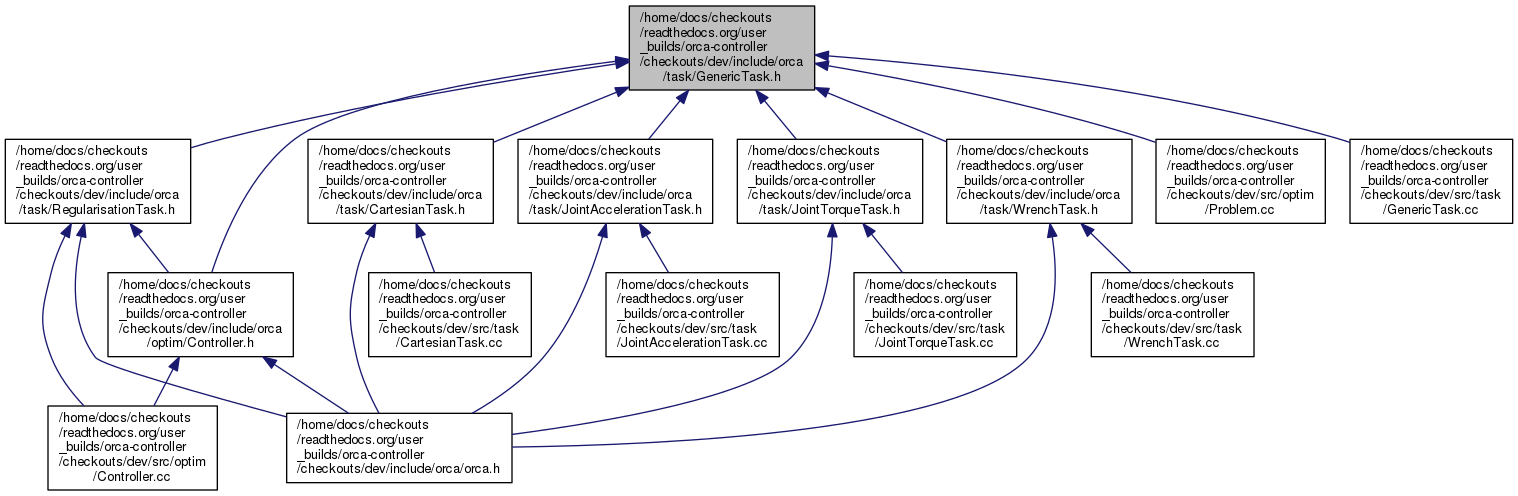
Include dependency graph for GenericTask.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Classes | |
| class | orca::task::GenericTask |
Namespaces | |
| orca | |
| orca::task | |
 1.8.11
1.8.11