|
ORCA: Optimization-based framework for Robotic Control Applications
|
|
ORCA: Optimization-based framework for Robotic Control Applications
|
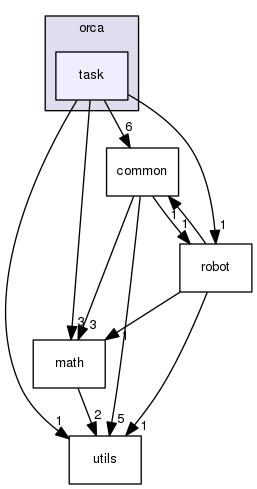
 Directory dependency graph for task:
Directory dependency graph for task:Files | |
| file | CartesianTask.h [code] |
| file | GenericTask.h [code] |
| file | JointAccelerationTask.h [code] |
| file | JointTorqueTask.h [code] |
| file | RegularisationTask.h [code] |
| file | WrenchTask.h [code] |
 1.8.11
1.8.11