|
| | ContactExistenceConditionConstraint (const std::string &name) |
| |
| void | setBaseFrame (const std::string &base_ref_frame) |
| |
| void | setControlFrame (const std::string &control_frame) |
| |
| | EqualityConstraint (const std::string &name, optim::ControlVariable control_var) |
| |
| const Eigen::VectorXd & | getLowerBound () const override |
| | Returns the lower bound from the constraint function (alias) More...
|
| |
| const Eigen::VectorXd & | getUpperBound () const override |
| | Returns the upperbound from the constraint function (alias) More...
|
| |
| Eigen::VectorXd & | bound () |
| |
| const Eigen::VectorXd & | getBound () const |
| |
| void | setBound (const Eigen::VectorXd &newBound) |
| |
| | GenericConstraint (const std::string &name, optim::ControlVariable control_var) |
| | Construct the double bounded function, and set its default state : activated. The lowerBound is set to -inf and the upper bound to +inf C is set to Zero by default. More...
|
| |
| virtual | ~GenericConstraint () |
| | Destructor. Also removes from problem if still active/inserted. More...
|
| |
| virtual void | print () const |
| |
| math::Size | getSize () const |
| | Get the size of the constraint matrix (rows,cols) More...
|
| |
| int | rows () const |
| | Get the number of rows of the constraint matrix. More...
|
| |
| int | cols () const |
| | Get the number of column (it should be the size of the control variable chosen) of the constraint matrix. More...
|
| |
| virtual const Eigen::MatrixXd & | getConstraintMatrix () const |
| | Returns the constraint matrix from the constraint function (alias) More...
|
| |
| const math::ConstraintFunction & | getConstraintFunction () const |
| | Get the underlying constraint function containing the 2 bound vectors and the constraint matrix. More...
|
| |
| | TaskBase (const std::string &name, optim::ControlVariable control_var) |
| |
| virtual | ~TaskBase () |
| |
| bool | isActivated () const |
| |
| bool | isComputing () const |
| |
| bool | setRobotModel (robot::RobotModel::Ptr robot) |
| |
| optim::ControlVariable | getControlVariable () const |
| |
| virtual bool | activate () |
| |
| virtual void | update (double current_time, double dt) |
| |
| virtual bool | deactivate () |
| |
| virtual bool | setProblem (std::shared_ptr< const orca::optim::Problem > problem) |
| |
| bool | hasProblem () const |
| |
| bool | hasRobot () const |
| |
| bool | dependsOnProblem () const |
| |
| bool | dependsOnWrench () const |
| |
| bool | dependsOnRobotJoints () const |
| |
| bool | dependsOnFloatingBase () const |
| |
| bool | hasWrench () const |
| |
| bool | isRobotInitialized () const |
| |
| State | getState () const |
| |
| void | setRampDuration (double ramp_time) |
| |
| double | getRampDuration () const |
| |
| double | getCurrentRampValue () const |
| |
| double | getStartTime () const |
| |
| double | getStopTime () const |
| |
| std::shared_ptr< const optim::Problem > | getProblem () const |
| |
| std::shared_ptr< const common::Wrench > | getWrench () const |
| |
| std::shared_ptr< const robot::RobotModel > | getRobot () const |
| |
| void | addChild (TaskBase::Ptr e) |
| | Add a child/slave task that will be updated BEFORE the parent task. More...
|
| |
| bool | hasParent () const |
| | Returns true if the task owned by a parent task. More...
|
| |
| bool | hasChildren () const |
| | Returns true if the task has children. More...
|
| |
| const std::string & | getParentName () const |
| | Returns the parent name if it exists, empty otherwise. More...
|
| |
| const std::string & | getPrintableName () const |
| | Returns the name that include parent name if present. More...
|
| |
| void | onResizedCallback (std::function< void(void)> cb) |
| |
| void | onActivationCallback (std::function< void(void)> cb) |
| |
| void | onActivatedCallback (std::function< void(void)> cb) |
| |
| void | onComputeBeginCallback (std::function< void(double, double)> cb) |
| |
| void | onComputeEndCallback (std::function< void(double, double)> cb) |
| |
| void | onDeactivationCallback (std::function< void(void)> cb) |
| |
| void | onDeactivatedCallback (std::function< void(void)> cb) |
| |
| | ConfigurableOrcaObject (const std::string &config_name) |
| |
| virtual | ~ConfigurableOrcaObject () |
| |
| template<class T > |
| void | addParameter (const std::string ¶m_name, Parameter< T > *param, ParamPolicy policy=ParamPolicy::Required, std::function< void()> on_loading_success=0) |
| | Returns true if all params added with have been set. More...
|
| |
| template<class T > |
| void | addParameter (const std::string ¶m_name, T ¶m, ParamPolicy policy=ParamPolicy::Required, std::function< void()> on_loading_success=0) |
| |
| ParameterBase * | getParameter (const std::string ¶m_name) |
| | Returns a param via its name. More...
|
| |
| void | printParameters () const |
| | Print all parameters to std::cout. More...
|
| |
| bool | configureFromFile (const std::string &yaml_url) |
| | Configure the task from YAML/JSON file. It must contain all the required parameters. More...
|
| |
| bool | configureFromString (const std::string &yaml_str) |
| | Configure the task from YAML/JSON string. It must contain all the required parameters. More...
|
| |
| bool | isConfigured () const |
| |
| const ParamMap & | getParameters () const |
| |
| void | onConfigureSuccess (std::function< void()> f) |
| |
| | OrcaObject (const std::string &name) |
| |
| virtual | ~OrcaObject () |
| |
| const std::string & | getName () const |
| |
| void | setName (const std::string &name) |
| |

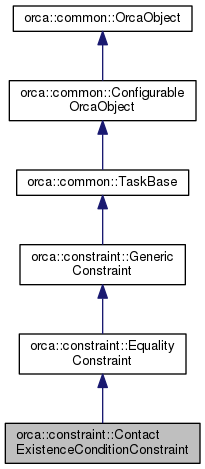
 Inheritance diagram for orca::constraint::ContactExistenceConditionConstraint:
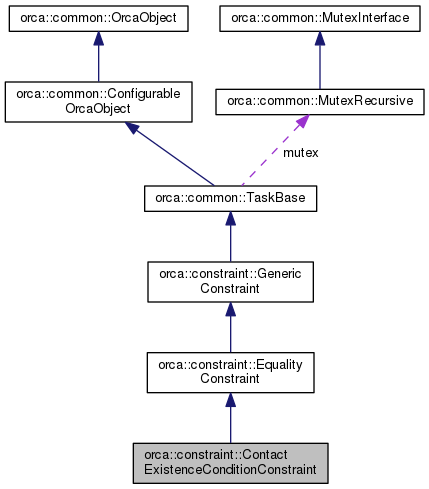
Inheritance diagram for orca::constraint::ContactExistenceConditionConstraint: 1.8.11
1.8.11