|
ORCA: Optimization-based framework for Robotic Control Applications
|
|
ORCA: Optimization-based framework for Robotic Control Applications
|
#include <TaskState.h>
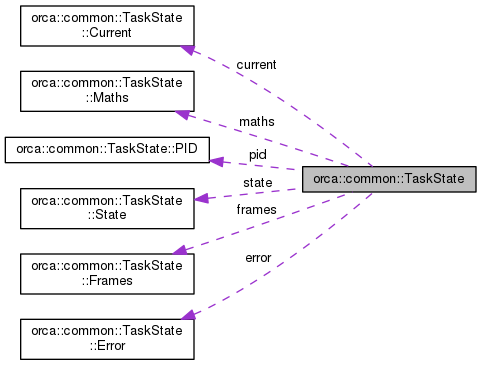
 Collaboration diagram for orca::common::TaskState:
Collaboration diagram for orca::common::TaskState:Classes | |
| struct | Current |
| struct | Error |
| struct | Frames |
| struct | Maths |
| struct | PID |
| struct | State |
Public Attributes | |
| std::string | name |
| ControlVariable | control_variable |
| struct orca::common::TaskState::Frames | frames |
| struct orca::common::TaskState::State | state |
| struct orca::common::TaskState::Maths | maths |
| struct orca::common::TaskState::Current | current |
| struct orca::common::TaskState::Error | error |
| struct orca::common::TaskState::PID | pid |
| ControlVariable orca::common::TaskState::control_variable |
| struct orca::common::TaskState::Current orca::common::TaskState::current |
| struct orca::common::TaskState::Error orca::common::TaskState::error |
| struct orca::common::TaskState::Frames orca::common::TaskState::frames |
| struct orca::common::TaskState::Maths orca::common::TaskState::maths |
| std::string orca::common::TaskState::name |
| struct orca::common::TaskState::PID orca::common::TaskState::pid |
| struct orca::common::TaskState::State orca::common::TaskState::state |
 1.8.11
1.8.11